Smart Sensors and Autonomous vehicles
Smart Sensors and Autonomous Energy-efficient devices (including drones and vehicles and the embedded control)
-

Optical flow camera -
Drones -

Autonomous Racing -

Dogs and Robots

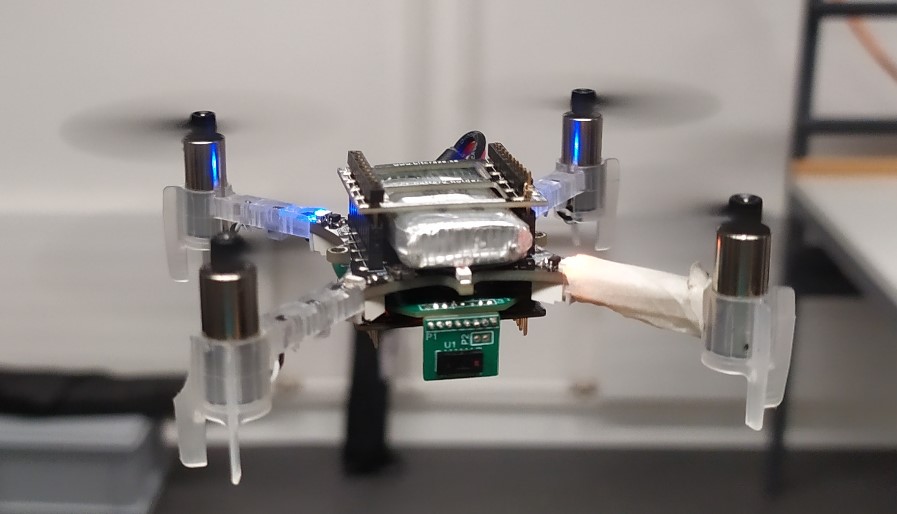

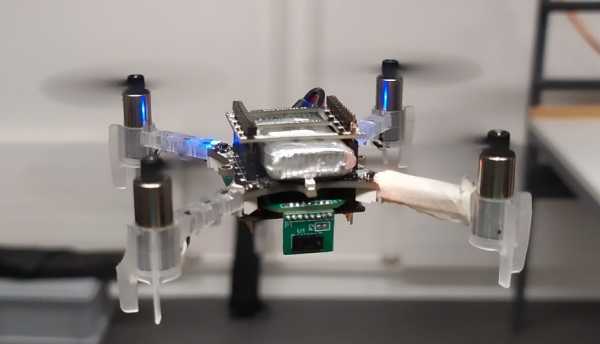
Demo Abstract: Towards Reliable Obstacle Avoidance for Nano-UAVs
Unmanned aerial vehicles (UAVs) are a very active research topic, and especially the nano and micro subclass, characterized by cen-timeter size and minimal on-board computational capabilities, have gained popularity in recent years. These lightweight platforms provide good agility and movement freedom in indoor environments, but it is still a significant challenge to enable autonomous navigation or basic obstacle avoidance capabilities using standard image sensors, due to the limited computational capabilities that can be hosted on-board. This work demonstrates the possibility of using a new multi-zone Time of Flight (ToF) sensor to enhance autonomous navigation with a significantly lower computational load than most common visual-based solutions. Our system proved reliable (>95%) in-field obstacle avoidance capabilities when flying in indoor environments with dynamic obstacles.
Robust and Efficient Depth-based Obstacle Avoidance for Autonomous Miniaturized UAVs
Nano-size drones hold enormous potential to explore unknown and complex environments. The first step towards full autonomy is reliable obstacle avoidance, which has proven to be technically challenging by itself in a generic indoor environment. Current approaches utilize vision-based or 1-dimensional sensors to support nano-drone perception algorithms. This work presents a lightweight obstacle avoidance system based on a novel millimeter form factor 64 pixels multi-zone Time-of-Flight (ToF) sensor and a generalized model-free control policy.
An open platform for efficient drone-to-sensor wireless ranging and data harvesting
Drones deployed in combination with wireless sensors can unlock a host of prospective applications in environments that lack infrastructure communications networks and where access may be impossible for human operators. This paper proposes and evaluates a new combination of ultra-wide band and wake-up radio technologies. These enable high precision landing and support energy efficient operation. We describe in detail the design and implementation of an open platform making use of the combination of these radios to improve upon ranging, bandwidth and energy efficiency problems that affect drone–wireless sensor systems.
Towards a Multi-Pixel Time-of-Flight Indoor Navigation System for Nano-Drone Applications
A promising UAV subclass includes nano and micro UAVs, characterized by centimeter size, few grams of payload and extremely limited on-board computational resources. Those features pose major challenges to enable autonomous navigation or even more basic relevant subtasks, such as reliable obstacle avoidance. This paper explores and characterizes a multi-zone Time of Flight (ToF) sensor to enhance autonomous navigation with a significantly lower computational load than most common visual-based solutions.
TC-Driver: Trajectory Conditioned Driving for Robust Autonomous Racing:
A Reinforcement Learning Approach
Autonomous racing is becoming popular for academic and industry researchers as a test for general autonomous driving by pushing perception, planning, and control algorithms to their limits. While traditional control methods such as MPC are capable of generating an optimal control sequence at the edge of the vehicles physical controllability, these methods are sensitive to the accuracy of the modeling parameters. This paper presents TC-Driver, a RL approach for robust control in autonomous racing. In particular, the TC-Driver agent is conditioned by a trajectory generated by any arbitrary traditional high-level planner. The proposed TC-Driver addresses the tire parameter modeling inaccuracies by exploiting the heuristic nature of RL while leveraging the reliability of traditional planning methods in a hierarchical control structure. We train the agent under varying tire conditions, allowing it to generalize to different model parameters, aiming to increase the racing capabilities of the system in practice. The proposed RL method outperforms a non-learning-based MPC with a 2.7 lower crash ratio in a model mismatch setting, underlining robustness to parameter discrepancies. In addition, the average RL inference duration is 0.25 ms compared to the average MPC solving time of 11.5 ms, yielding a nearly 40-fold speedup, allowing for complex control deployment in computationally constrained devices. Lastly, we show that the frequently utilized end-to-end RL architecture, as a control policy directly learned from sensory input, is not well suited to model mismatch robustness nor track generalization. Our realistic simulations show that TC-Driver achieves a 6.7 and 3-fold lower crash ratio under model mismatch and track generalization settings, while simultaneously achieving lower lap times than an end-to-end approach, demonstrating the viability of TC-driver to robust autonomous racing.
TC-Driver: A Trajectory Conditioned Reinforcement,Learning Approach to Zero-Shot Autonomous Racing [Not published yet]
Autonomous racing is becoming popular for academic and industry researchers as a test for general autonomous driving by pushing perception, planning, and control algorithms to their limits. While traditional control methods such as Model Predictive Control (MPC) are capable of generating an optimal control sequence at the edge of the vehicles’ physical controllability, these methods are sensitive to the accuracy of the modeling parameters, such as tire modeling coefficients. This paper presents TC-Driver, a Reinforcement Learning (RL) approach for robust control in autonomous racing. In particular, the TC-Driver agent is conditioned by a trajectory generated by any arbitrary traditional high-level trajectory planner. The proposed TC-Driver architecture addresses the tire parameter modeling inaccuracies by exploiting the heuristic nature of RL while leveraging the reliability of traditional planning methods in a hybrid fashion. We train the agent under varying tire conditions, allowing it to generalize to different model parameters, aiming to increase the racing capabilities of the system in practice. Experimental results demonstrate that the proposed hybrid RL architecture of the TC-Driver improves the generalization robustness of autonomous racing agents when compared to a previous State-of-the-Art (SotA) end-to-end based architecture. Namely, the proposed controller yields a 29-fold improvement in crash ratio when facing model mismatch and can zero-shot transfer its behavior on unseen tracks which present completely new features, while the end-to-end baseline fails. When deployed on a physical system, the proposed architecture demonstrates zero-shot Sim2Real capabilities, that outperform end-to-end agents 10-fold in terms of crash ratio while exhibiting similar driving characteristics in reality as in simulation.
Model- and Acceleration-based Pursuit Controller for High-Performance Autonomous Racing
Autonomous racing is a research field gaining large popularity, as it pushes autonomous driving algorithms to their limits and serves as a catalyst for general autonomous driving. For scaled autonomous racing platforms, the computational constraint and complexity often limit the use of Model Predictive Control (MPC). As a consequence, geometric controllers are the most frequently deployed controllers, they prove to be performant while yielding implementation and operational simplicity. Yet, they inherently lack the incorporation of model dynamics, thus limiting the race-car to a velocity domain where tire slip can be neglected. This paper presents Model and Acceleration based Pursuit (MAP) a high-performance model-based trajectory tracking algorithm that preserves the simplicity of geometric approaches while leveraging the tire dynamics. The proposed algorithm allows accurate tracking of a trajectory at unprecedented velocities compared to State-of-the-Art (SotA) geometric controllers. The MAP controller is experimentally validated and outperforms the reference geometric controller four-fold in terms of lateral tracking error, yielding a tracking error of 0.055 m at tested speeds up to 11 m/s.